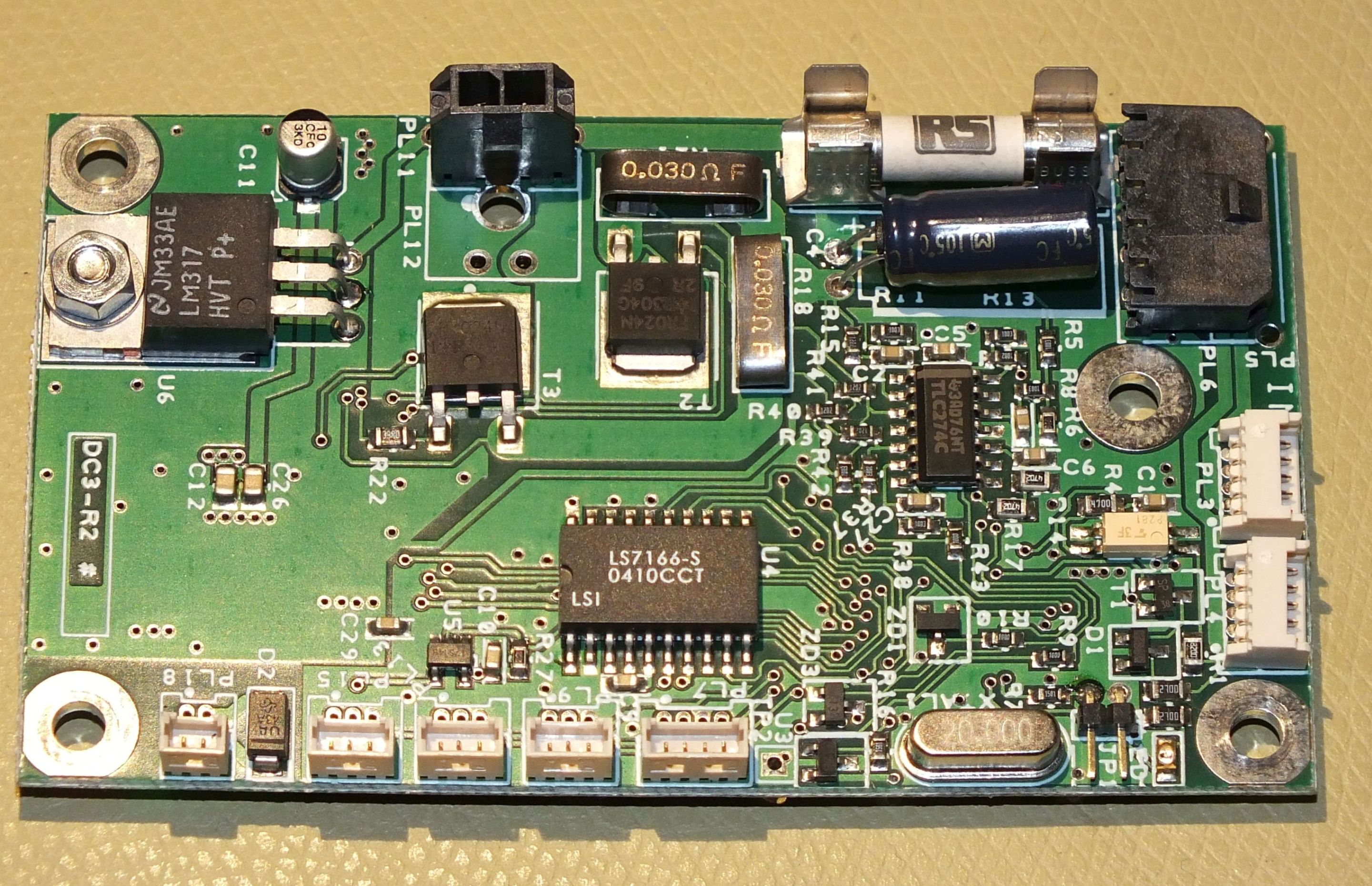
Nothing too exciting really. Power in top right corner, fuse, 39uF capacitor across supply. T2/T3 are the two low side switches in the H-bridge, 30mOhm current sense resistors on the low side of each leg. TLC274 for the current sense circuitry. LS7166-S 24bit quadrature counter handles the encoder.

Bottom side, 89C51CC01 with built in CAN controller, MCP2551 CAN tranceiver, 78L05 regulator, TL431 reference, the two top side switches of the bridge and the HIP4081A bridge drive IC.
On the system level there was a big box with a 1.1kW 48VDC switch mode power supply for the motors, a 24VDC auxillary supply, safety relay, contactors etc. A standard Windows XP PC for the userinterface which communicated with an "industrial PC" (a stack of PC104 stuff from Versalogic) via ethernet. The "industrial PC" then handled the CAN-bus and some discrete I/O signals. Unfortunately I don't know anything about how the software was divided between the system, which one handled all the calculations etc.
The robot was controlled using a bog standard gamepad controller. The aproach was (and still is as can be seen in the videos linked to further down) that you steered the "head" of the snake and the body followed wherever you went (within limits of course). The path was recorded so you could easily "retract" and/or play back the path.
As I said, this was some 13-14 years ago now but I'm happy to see that OC Robotics is very much still around (no I don't work for them). Here are a couple of vidoes I found that may give you a better idea of how it works and see some "in action":
The second one is a little bit of a MAXON motor infomercial but look and listen beyond that to see what the robots can do (I remember Andy, the guy in the video, from when we did the project for which the robots were bought):
If you look at 1.15-1.25 in the following video you'll see the very robot I just tore down. The footage is from a mockup but the still images are from the actual repair.
We have a second one exactly like this one and also another shorter but more rigid unit. The principle is exactly the same but the engineering that went into that one is even more impressive due to serious space constraints. If there's any interest I'll shoot some pictures of it too, haven't decided its faith yet.
Anyway, not much electronics but I hope you found it interesting none the less.



